
GTJZ0808 Платформаи амалиёти кайчи ҳавоӣ





I. Шарҳи маҳсулот ва хусусиятҳои
Платформаи нави кори ҳавоӣ, ки аз ҷониби XCMG таҳия шудааст, дорои баландии кор дар 10 м, паҳнои мошин дар 0,81 м, бори номиналӣ дар 230 кг, макс.дарозии платформа дар 3,2 м ва макс.баҳодиҳӣ дар 25%.Ин мошин дорои сохтори паймон, иҷрои пешрафта, дастгоҳҳои бехатарии анҷомёфта, махсусан барои сохтмон мувофиқ аст.Дар Илова.Он аз ҳама гуна ифлосшавӣ озод аст, бо баландбардорӣ / паст кардани устувор, назорат ва нигоҳдории осон.Аз ин рӯ, ин гуна платформаҳо дар анборҳо, фабрикаҳо, фурудгоҳҳо ва вокзалҳо, махсусан дар ҷойҳои танги корӣ васеъ истифода мешаванд.
Сохтори паймон XCMG GTJZ0808 метавонад дар фазои танг чандир татбиқ карда шавад; бо системаи нави гардонандаи барқ, рондан ҳамвортар, бе партовҳо аз ҷиҳати экологӣ тозатар аст;системаи пешбари саноат автоматии ҳифзи чоҳ, бехатар ва боэътимод;фазои кории платформаи васеътар.Shear метавонад дар сохтмон ва нигоҳдории биноҳои тиҷоратӣ, анборҳо, фурудгоҳҳо ва дигар соҳаҳо истифода шавад.
II.Муқаддимаи Қисмҳои асосӣ
1. Шасси
Конфигуратсияҳои асосӣ: ду рули чарх, гардонандаи 4 × 2, системаи тормози худкор, системаи муҳофизати чуқури худкор, шинаҳои резинии бефосила ва озодкунии дастии тормоз
(1) Суръати максималии ронандагӣ дар 3,5 км/соат.
(2) Сатҳи ҳадди аксар дар 25%.
(3) Думи шасси бо сӯрохи стандартӣ барои интиқоли чангак муҷаҳҳаз аст.
(3) Системаи худкори муҳофизати чоҳ - таъмини бехатарии платформа барои бардоштан
(4) Шинаҳои резинии бефосила - бори баланд, дави устувор ва муҳити зист
(5) рондани 4×2;чархҳои гардиш низ чархҳои рондаанд;се фишангҳои суръати ҳаракаткунанда;пиёдагардии ҳаматарафа иҷозат дода мешавад;
(6) Системаи тормози худкор -- мошин ҳангоми боздоштани ҳаракат ё дар нишеби бозистод тормоз мекунад;гайр аз ин, тормози иловагии дастӣ барои ҳолати фавқулодда;
2. Бум
(1) Як силиндраи люффинг + чор маҷмӯи бум навъи кайчи
(2) Пӯлоди қавӣ - бум сабук вазннок ва бехатартар;
(3) Қувваи мувофиқ ва сахт - боварӣ ҳосил кунед, ки бум боэътимод аст.
(4) Чаҳорчӯбаи санҷиш - санҷишро бехатар нигоҳ медорад
3. Платформаи корӣ
(1) Платформаи асосӣ метавонад бори боркаш то 230 кг ва зерплатформа то 115 кг дошта бошад.
(2) Дарозии платформаи корӣ × паҳнои: 2,27 м × 0,81 м;
(3) Зерплатформа метавонад бо як роҳ то 0,9 м дароз карда шавад;
(4) Дарвозаи платформаи худ қуфл карда мешавад
(5) Муҳофизати платформа
4. Системаи гидравликӣ
(1) Унсурҳои гидравликӣ - насоси гидравликӣ, клапани асосӣ, муҳаррики гидравликӣ ва тормоз аз истеҳсолкунандагони машҳури ватанӣ (ё байналмилалӣ) мебошанд
(2) Системаи гидравликӣ бо насоси фишанги мотор идора карда мешавад, то платформаро баланд ё паст кунад ва платформаро идора ва идора кунад.
(3) Балони борбардор бо клапани пасткунандаи фавқулодда муҷаҳҳаз аст - боварӣ ҳосил кунед, ки платформа ҳатто ҳангоми садама ё қатъи нерӯи барқ метавонад бо суръати устувор то ба ақибнишинӣ поин равад.
(4) Силиндраи бардоранда бо қулфи гидравликӣ муҷаҳҳаз шудааст, то баландии боэътимоди нигоҳдории платформаи корӣ пас аз шикастани шланги гидравликӣ таъмин карда шавад.
5. Системаи электрики
(1) Системаи барқӣ технологияи идоракунии автобуси CAN-ро истифода мебарад. Шасси бо контроллер муҷаҳҳаз шудааст, платформа бо дастаки идоракунӣ муҷаҳҳаз шудааст ва иртибот байни шасси ва контролери платформа тавассути автобуси CAN амалӣ карда мешавад, то ки кори мошинро назорат кунад. .
(2) Технологияҳои назорати мутаносиб ҳар як амалро устувор мекунанд.
(3) Системаи барқ ҳамаи амалҳоро назорат мекунад, аз ҷумла рондан ба чап/рост, ҳаракат ба пеш/қафо, гузариш байни суръати баланд ва паст ва бардоштан/фуровардани платформаи корӣ.
(4) Усулҳои сершумори бехатарӣ ва огоҳӣ: муҳофизаткунандаи чархзанӣ;қуфлбандии дастаҳо;муҳофизати автоматии чоҳ;муҳофизати автоматии пастсуръат дар баландии баланд;таваққуф барои се сония афтодан;системаи огоҳкунии вазнин (ихтиёрӣ);системаи муҳофизатии барқ;тугмаи ҳолати фавқулодда;садои амал, дурахши басомад, шох, таймер ва системаи ташхиси хато.
III.Конфигуратсияи унсурҳои асосӣ
| С/Н | Компоненти асосӣ | Миқдор | Бренд | Шарҳ |
| 1 | Назоратчӣ | 1 | Хиршман/Водии Шимолӣ | |
| 2 | Насоси асосӣ | 1 | Сант/Бучер | |
| 3 | Мотор гидравликӣ | 2 | Данфосс | |
| 4 | Тормози гидравликӣ | 2 | Данфосс | |
| 5 | Воҳиди барқ | 1 | Bucher/GERI | |
| 6 | Цилиндраи чирку | 1 | Шӯъбаи гидротехникии XCMG / Dacheng / Shengbang / Diaojiang | |
| 7 | Цилиндри руль | 1 | ||
| 8 | Батарея | 4 | Trojan/Leoch | |
| 9 | Пуркунандаи барқ | 1 | GPD | |
| 10 | Калиди маҳдудият | 2 | Honeywell/CNTD | |
| 11 | Калиди санҷишӣ | 2 | Honeywell/CNTD | |
| 12 | Ҳаракати мотор | 1 | Куртис | |
| 13 | Шина | 4 | Exmile/Topower | |
| 14 | Сенсори кунҷ | 1 | Honeywell | Ихтиёрӣ |
| 15 | Сенсори фишор | 1 | данфос | Ихтиёрӣ |
IV.Ҷадвали параметрҳои асосии техникӣ
| Адад | Воҳиди | Параметр | Таҳаммулпазирии иҷозатдодашуда | |
| Андозаи мошин | Дарозӣ (бе нардбон) | mm | 2485 (2285) | ±0,5% |
| Васеъ | mm | 810 | ||
| Баландӣ (платформа пӯшида) | mm | 2345 (1965) | ||
| Пойгоҳи чарх | mm | 1871 | ±0,5% | |
| Роҳи чарх | mm | 683 | ±0,5% | |
| Тозакунии ҳадди ақали замин (Ҳимоятгари чоҳ боло/фуромада) | mm | 100/20 | ±5% | |
| Андозаи платформаи корӣ | Дарозӣ | mm | 2276 | ±0,5% |
| Васеъ | mm | 810 | ||
| Баландӣ | mm | 1254 | ||
| Дарозии дароз кардани платформаи ёрирасон | mm | 900 | ||
| Мавқеи марказии мошин | Масофаи уфуқӣ то чоҳи пеши | mm | 927 | ±0,5% |
| Баландии центроид | mm | 475 | ||
| Вазни умумии мошин | kg | 2170 | ±3% | |
| Макс.баландии платформа | m | 8 | ±1% | |
| Мин.баландии платформа | m | 1.2 | ±1% | |
| Баландии максималии корӣ | m | 10 | ±1% | |
| Радиуси ҳадди ақали гардиш (чархи дарунӣ/берунӣ) | m | 0/2.3 | ±1% | |
| Сарбории номиналии платформаи корӣ | kg | 230 | — | |
| Боркунии боркаш пас аз васеъ кардани платформаи корӣ | kg | 115 | — | |
| Вақти бардоштани платформаи корӣ | s | 29 ~ 40 | — | |
| Коҳиш додани вақти платформаи корӣ | s | 34 ~ 45 | — | |
| Макс.суръати давидан дар мавқеи паст. | км/соат | ≥3,5 | — | |
| Макс.суръати сафар дар баландии баланд | км/соат | ≥0,8 | — | |
| Сатҳи максималӣ | % | 25 | — | |
| Кунҷи огоҳии тамға (тараф / пеш ва қафо) | ° | 1,5/3 | ||
| Моторҳои бардоранда / равон | Модели | — | — | — |
| Қувваи номиналӣ | kW | 3.3 | — | |
| Истеҳсолкунанда | — | — | — | |
| Батарея | Модели | — | T105/DT106 | — |
| Шиддат | v | 24 | — | |
| Иқтидор | Ah | 225 | — | |
| Истеҳсолкунанда | — | Trojan/Leoch | — | |
| Моделҳои шина | — | Беназар ва сахт /381×127 | — | |
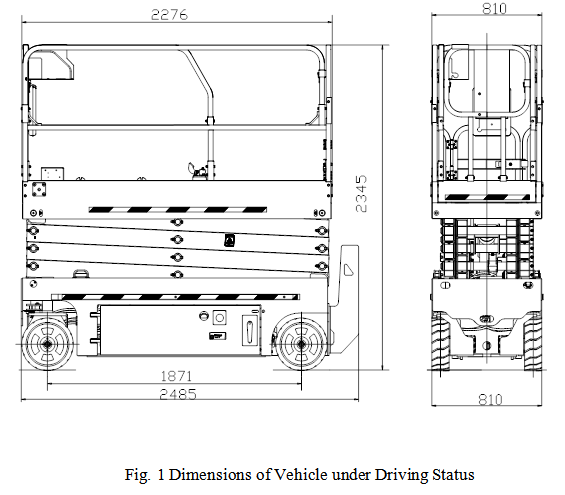
V. Диаграммаи андозагирии мошин дар ҳолати коркунанда
Замима: конфигуратсияҳои ихтиёрӣ
(1) Системаи огоҳкунии бор
(2) Чароғи кории платформа
(3) Ба қубури ҳавоии платформаи корӣ пайваст карда шудааст
(4) Ба таъминоти барқи AC платформаи корӣ пайваст карда шудааст



