GTBZ14JD Платформаи амалиёти ҳавоии бозуи барқӣ





I. Шарҳи маҳсулот ва хусусиятҳои
Платформаҳои кории ҳавоии электрикӣ аз ҷониби XCMG, сохторҳои паймон ва бадани автомобил бо паҳнои 1,75 м таҳия шудаанд.Системаи идоракунии оқилона ва мукаммал дорои тарҳбандии инсонӣ, тарҳрезии бе нигоҳдорӣ ва осон истифода ва нигоҳдорӣ буда, имконоти гуногун ва амнияти ҳамаҷонибаро таъмин мекунад.
[Бартариятҳо ва хусусиятҳо]
●Σ-шакл комбайни бум ва тарҳи сифр - дрейф онро самараноктар мекунад.
●Радиуси гардиш то 3,15 м хурд аст, ки ба мошин имкон медиҳад, ки дар фазои танг кор кунад.
●Батареяи иқтидори калон 48V ва 420Ah қобилияти сайругаштро дарозтар мекунад.
●Технологияҳои пешрафтаи муҳаррики AC;технологияи идоракунии дифференсиалии идоракунӣ;амалҳои қавӣ ва устувор;қобилият то 30%
●Насоси DC ва технологияҳои назорати мутаносиби энергия каммасраф ва самаранок буда, корро устувортар ва бехатартар мекунанд.
●Дӯстона ба муҳити зист, партовҳои сифр, садои паст, саёҳати бефосила, барои сохтмони дарунӣ мувофиқ.
II.Муқаддимаи Қисмҳои асосӣ
1. Қисми шасси
Конфигуратсияҳои асосӣ;2WD, ду рули чарх, шинаҳои сахт.
(1) Суръати ҳадди аксар дар 5,2 км/соат.
(2) Сатҳи ҳадди аксар дар 30%.
(3) Редуктори дарунсохт, ки мотор ва редукторро муттаҳид мекунад, истифода мешавад ва ду суръати ҳаракат (суръати баланд ва суръати паст) барои қонеъ кардани талаботи ронандагии мошин дар муҳитҳои гуногун пешбинӣ шудааст.Механизми ҳаракаткунанда ҳангоми ҳаракат дар нишебиҳо функсияи худтанзимкуниро дорад ва бо дастгоҳи муфта муҷаҳҳаз шудааст, то кашонидани кашолакуниро дар ҳолати носозгор осон кунад.
(4) Механизми кранк-слайдер барои гардиш барои амалӣ кардани радиуси гардиши хурдтар;
2. Қисми бум
(1) Бозуи пӯшонидашаванда + бозуи телескопӣ + кранка
(2) Маводи бум - Ривоҷ аз пӯлоди мустаҳкам кафшер карда мешавад, то бехатарии сабук ва баландро дарк кунад.
(3) Дасти қаҳвашаванда аз ду маҷмӯи сохторҳои параллелограмӣ иборат аст, ки дар байни онҳо пайванд доранд ва метавонанд дар як вақт бо ёрии силиндраи люфинг ҳаракат карда, корро самараноктар гардонанд.
(4) Ду ќисми дастакњои телескопї, ки навъи як силиндраи телескопї мебошанд;дастҳои кранка параллелограмм мебошанд
3. Қисмати гардишгар
(1) 355° гардиши фосилавӣ ва ду сӯрохи васлкунӣ барои интиқоли пинҳои қулф;
(2) Табдилдиҳанда аз табақи ягона бо қабурғаи мустаҳкам иборат аст;нуқтаҳои ҳалқа баланд гузошта шудаанд ва вазн дар паси гардиш ҷойгир карда шудааст;
4. Қисми платформа
(1) 1.4m × 0.7m платформаи кори калон.
(2) платформаи гардиши 160°.
(3) Иқтидори борбардорӣ то 227 кг.
(4) Электро-гидравликӣ мутаносиб системаи автоматии баробарсозии.
5. Системаи гидравликӣ
(1) Қисмҳои гидравликӣ - Қисмҳои асосӣ, аз ҷумла насоси гидравликӣ ва клапани усто, маҳсулоти бренди машҳури байналмилалиро қабул мекунанд.
(2) Системаи гидравликӣ бо насоси батарея ронда мешавад;насоси фишанги бевосита бо мотор ронда мешавад.
(3) Системаи гидротехникии болоии иншоот аз системаи насоси фишанги доимии ҷараён аст: дар асоси технологияҳои назорати мутаносиби электрикӣ-гидравликӣ, мошин метавонад гардиши болои иншоот, луф кардани бум, кашиш / дароз кардани бум, гардиши корро иҷро кунад. платформа;клапани асосии надстройка аз клапани мутаносиби электрикӣ-гидравликӣ мебошад.
(4) Дастгоҳи барқии фавқулодда насб карда шудааст - Он метавонад кафолат диҳад, ки бум дар ҳолати корношоямии муҳаррик ё насоси нафт метавонад ба ҳолати ронандагӣ баргардад.
6. Системаи электрики
(1) Технологияи назорати PLC - Ҳар як барои гардиш ва платформа як контроллер таъмин карда мешавад.Қуттии идоракунӣ барои гардиши шасси ва платформа мутаносибан барои идоракунии шасси, гардишгар, бум ва платформа насб карда шудааст.
(2) Унсурҳои асосии идоракунӣ - идоракунии шасси ва идоракунии сафар;гардиши табақ;бум телескопӣ;назорати луф;гардиши платформа
(3) Усулҳои сершумори муҳофизати бехатарӣ - мониторинги гардонандаи мотор;муҳофизат аз изофабории мотор;огоҳӣ аз чарх задани мошин;огоҳии аз ҳад зиёд;суръати баланд маҳдуд;тарки фавқулодда;
III.Конфигуратсияи Қисмҳои асосии GTBZ14JD
| С/Н | Ном | Миқдор | Шарҳ |
| Батарея | 8 | Троян | |
| Пуркунандаи барқ | 1 | Донгуан Лонгшен | |
| Ҳаракати мотор | 2 | КУРТИС | |
| Редукторҳои сайёҳӣ | 2 | Омни | |
| Моторҳои AC-ро иҷро мекунанд | 2 | KDS | |
| Насоси асосии батарея | 1 | БУЧЕР | |
| Насоси батареяи ёрирасон | 1 | БУЧЕР | |
| Насоси асосӣ | 1 | Сант | |
| Силиндраи чархзананда | 1 | ИМА HELAC | |
| Цилиндраи ҳамворкунӣ | 2 | Chengdu Chenggang Hydraulic Equipment Co., Ltd./XCMG Hydraulic Parts Co., Ltd. | |
| Цилиндраи борбардори №1 | 2 | ||
| Цилиндраи борбардори № 2 | 1 | ||
| Цилиндраи бозуи кранка | 1 | ||
| Силиндраи телескопӣ | 1 | ||
| Цилиндри руль | 1 | ||
| Клапани мувозинат | 5 | Сант/ЕАТОН | |
| Назоратчӣ | 2 | Хиршман | |
| Сенсори тамоюли дукарата | 1 | Паркер | |
| Намоиш | 1 | Xuzhou Hirschmann Electronic Co., Ltd. | |
| Ҷойстик | 2 | Данфосс | |
| Калиди пой | 1 | ОФТОБ | |
| Чарх кардан ва рондан | 1 | Хуафанг | |
| Моторҳои чархзананда | 1 | Сафед | |
| Шинҳо | 4 | Лайчжоу Йишимай |
IV.Ҷадвали GTBZ14JD Параметрҳои асосии техникӣ
| Адад | Параметр |
| Параметрҳои ҳолати кор | |
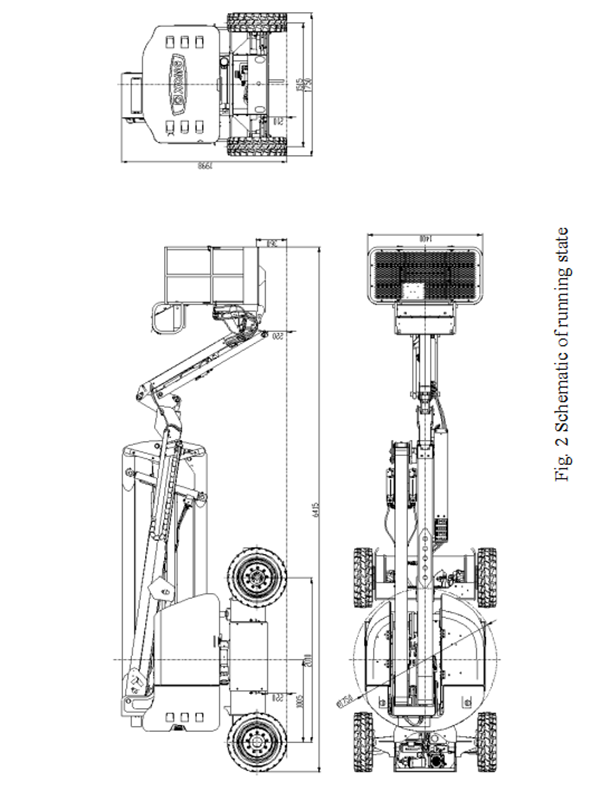
| Андозаҳои умумӣ (L × В × H) | 6,42×1,75×2 м |
| Андозаи умумии платформаи корӣ | 1,4×0,7×1,15 м |
| Суръати максималӣ | 5,2 км/соат |
| Сатҳи максималӣ | ≥30% |
| Мин.радиуси гардиши беруна | ≤3,15 м |
| Тозакунии замин/м (марказ) | 0,21 м |
| Пойгоҳи чарх | 2 м |
| Вазни умумӣ | 6500 кг |
| Параметрҳои асосии иҷрои амалиёт | |
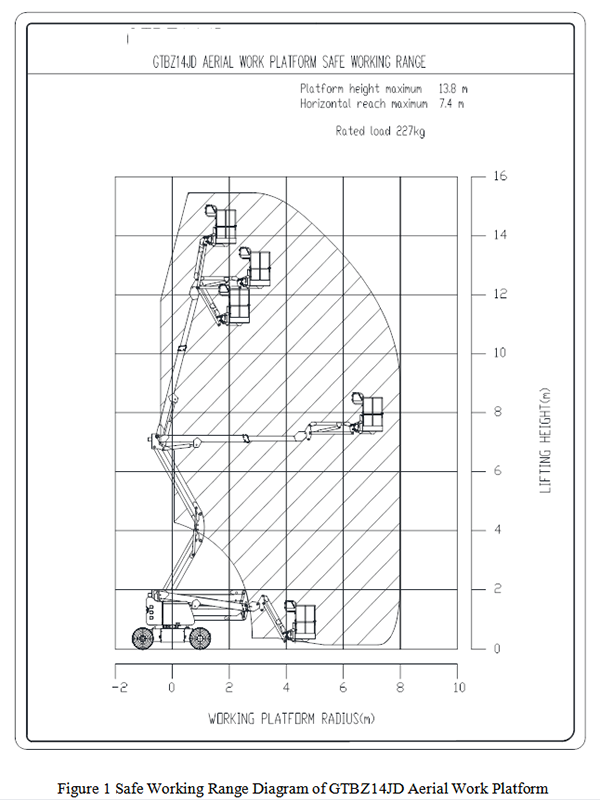
| Баландии кории номиналӣ | 15,5 м |
| Баландии максималии платформа | 13,8 м |
| Макс.доираи кор | 8 м |
| Баландии ҳадди аксар паҳншавии шабака | 7,03 м |
| Доираи луфинги бозуи №1 | 0°~60° |
| Доираи луфинги бозуи № 2 | -8°~75° |
| Миқёси люффинги бозуи кранка | -60°~80° |
| Доираи гардиши платформа | 180° |
| Кунҷи гардиш | 355° |
| Радиуси гардиши табақ | 0,875 м |
| Максимум боркунӣ | 227 кг |
| Гардиши максималӣ ба ақиб | 0 м |
| Системаи назорат | Назорати мутаносиби 12V DC |
| Шина | 250-15 шина сахт, ихтиёрӣ 240/55 D17.5 |
| Параметрҳои қудрат | |
| Манбаи нерӯ | 420 Ah/48 В DC |
| Воҳиди барқ | 4 кВт/48 В DC |
| Воҳиди қувваи ёрирасон | 2,2 кВт/24 В DC |
| Моторҳои равон | 3,3 кВт/32 В AC |
V. Диаграммаи бехатарии кори мошин
Замима: конфигуратсияҳои ихтиёрӣ
6.1 Шинаи сахти аз ҷиҳати экологӣ тоза (без)
6.2 Таъмини барқи платформа
Генератори гидравликӣ ё таъминоти барқи беруна барои истифода ба ин платформа пайваст карда шудааст.
Мушаххасоти сими барқ: 4×4мм2
Ҷараёни номиналӣ: 35A
6.3 Қубури ҳавоии платформа
Таъмини ҳавои беруна барои истифода ба ин платформа интиқол дода мешавад.
Диаметри қубурҳои ҳавоӣ: 8мм
6.4 Кронштейн зидди зарбаи платформа
Дастгоҳи зидди зарбаи қатшаванда бояд операторро аз таъсири ашёи дар боло зикршуда ҳангоми болоравии платформа муҳофизат кунад ва инчунин метавонад пӯшида бошад ва фазои корро ишғол накунад.