
GTJZ0607 Платформаи амалиёти кайчи





I. Шарҳи маҳсулот ва хусусиятҳои
Мошини нави кори ҳавоӣ, ки аз ҷониби XCMG таҳия шудааст, дорои баландии кории 7,8 м, паҳнои 0,76 м, бори номиналии 230 кг, дарозии максималии платформа 2,6 м ва нишебии максималии 25% мебошад.Бо сохтори паймон, иҷрои пешрафта ва дастгоҳҳои мукаммали бехатарӣ, мошини боркаш махсусан барои сохтмон мувофиқ аст.Дар Илова.Он аз ҳама гуна ифлосшавӣ, бардоштан ва паст кардани ҳамвор, назорат ва нигоҳдорӣ осон аст.Аз ин рӯ, ин платформа дар анборҳо, фабрикаҳо, фурудгоҳҳо ва вокзалҳо, махсусан дар ҷойҳои кории танг васеъ истифода мешавад.
[Бартариятҳо ва хусусиятҳо]
●Системаи пурсамар ва каммасрафи барқии гардонанда дорои партовҳои сифр ва садои кам, дар якҷоягӣ бо шинаҳои бефосила, имкон медиҳад, ки ин мошин дар муҳити пӯшида, аз қабили бинои офис, беморхонаҳо ва мактабҳо ба осонӣ кор кунад ва таъсир ба муҳити зистро кам кунад.
●Механизми фаъоли муҳофизатӣ, аз қабили механизми муҳофизати чуқурӣ ва системаи назорати бехатарии худ таҳияшуда тарҳи инсонӣ ва имконоти бойро дар бар мегирад, ки ба фармоишгар барои бехатарӣ, эътимоднокӣ ва иктишофӣ ниёз дорад.
●Тарҳи сохтори танг имкон медиҳад, ки автомобили пурра аз як дарвоза ба осонӣ гузарад;девори катшаванда метавонад нақлиётро осон кунад
●“Радиуси гардиши сифр” беназир аст ва имкон медиҳад, ки мошин дар як ҳуҷраи танг кунҷ кунад.
●Макс.боркашонй дар 230 кг, пешеафи саноат.
●Суръати максималии сафар 4км/соат ва қобилияти 25% рондани мошинро осонтар мекунад.
II.Муқаддимаи Қисмҳои асосӣ
1. Шасси
Конфигуратсияҳои асосӣ: ду рули чарх, гардонандаи 4 × 2, системаи тормози худкор, системаи муҳофизати чуқури худкор, шинаҳои резинии бефосила ва озодкунии дастии тормоз
(1) Суръати максималии ронандагӣ дар 4 км/соат.
(2) Сатҳи ҳадди аксар дар 25%.
(3) Думи шасси бо сӯрохи стандартӣ барои интиқоли чангак муҷаҳҳаз аст.
(3) Системаи худкори муҳофизати чоҳ - таъмини бехатарии платформа барои бардоштан
(4) Шинаҳои резинии бефосила - бори баланд, дави устувор ва муҳити зист
(5) рондани 4×2;чархҳои гардиш низ чархҳои рондаанд;се фишангҳои суръати ҳаракаткунанда;пиёдагардии ҳаматарафа иҷозат дода мешавад;
(6) Системаи тормози худкор -- мошин ҳангоми боздоштани ҳаракат ё дар нишеби бозистод тормоз мекунад;гайр аз ин, тормози иловагии дастӣ барои ҳолати фавқулодда;
2. Бум
(1) Як силиндраи люффинг + чор маҷмӯи бум навъи кайчи
(2) Пӯлоди қавӣ - бум сабук вазннок ва бехатартар;
(3) Қувваи мувофиқ ва сахт - боварӣ ҳосил кунед, ки бум боэътимод аст.
(4) Чаҳорчӯбаи санҷиш - санҷишро бехатар нигоҳ медорад
3. Платформаи корӣ
(1) Платформаи асосӣ метавонад бори боркаш то 230 кг ва зерплатформа то 115 кг дошта бошад.
(2) Дарозии платформаи корӣ × паҳнои: 1,88 м × 0,76 м;
(3) Зерплатформаро дар як самт 0,9 м дароз кардан мумкин аст
(4) Дари платформа метавонад худаш қулф карда шавад
(5) Муҳофизати платформа метавонад пӯшонида шавад
4. Системаи гидравликӣ
(1) Ҷузъҳои гидравликӣ - насоси гидравликӣ, клапани асосӣ, муҳаррики гидравликӣ ва тормоз ҳама аз ҷониби истеҳсолкунандагони машҳури ватанӣ (ё байналмилалӣ) истеҳсол карда мешаванд.
(2) Системаи гидравликӣ бо насоси фишанги моторӣ идора карда мешавад, бинобар ин бардоштан ва паст кардани платформа ва давидан ва идоракунии платформаро амалӣ мекунад.
(3) Силиндраи бардоранда бо клапани фуромадани фавқулодда муҷаҳҳаз аст - то боварӣ ҳосил кунад, ки платформа ҳатто дар ҳолати садама ё қатъи барқ бо суръати мӯътадил ба бозпас фуромада метавонад.
(4) Силиндраи бардоранда бо қулфи гидравликӣ муҷаҳҳаз шудааст, то платформаи корӣ пас аз шикастани шланги гидравликӣ баландиро боэътимод нигоҳ дорад.
5. Системам электрики
(1) Системаи барқ технологияи назорати автобусро CAN қабул мекунад.Шасси бо контроллер ва платформа бо дастаки идоракунӣ муҷаҳҳаз аст.Алоқа байни шасси ва контролери платформа тавассути автобуси CAN амалӣ карда мешавад, то ки кори мошинро назорат кунад.
(2) Технологияи назорати мутаносиб ҳар як амалро устувор месозад.
(3) Системаи электрикӣ ҳама ҳаракатҳоро назорат мекунад, аз ҷумла идоракунии чап/рост, ҳаракати пеш/қафо, гузариши баланд/суръати паст ва бардоштани платформаи корӣ.
(4) Усулҳои сершумори бехатарӣ ва огоҳӣ: муҳофизати майл;бастабандии даста;муҳофизати автоматии чоҳ;њифзи автоматии суръати паст дар баландии баланд;таваққуфи се сония фуромадан;системаи огоҳсозии бори вазнин (ихтиёрӣ);системаи муҳофизати барқ;тугмаи ҳолати фавқулодда;садои амал, нури дурахши инвертер, шох, таймер ва системаи ташхиси хато.
III.Конфигуратсияи унсурҳои асосӣ
| С/Н | Компоненти асосӣ | Миқдор | Бренд | Шарҳ |
| 1 | Назоратчӣ | 1 | Хиршман/Водии Шимолӣ | |
| 2 | Насоси асосӣ | 1 | Сант/Бучер | |
| 3 | Мотор гидравликӣ | 2 | Данфосс | |
| 4 | Тормози гидравликӣ | 2 | Данфосс | |
| 5 | Воҳиди барқ | 1 | Bucher/GERI | |
| 6 | Цилиндраи чирку | 1 | Шӯъбаи гидротехникии XCMG / Dacheng / Shengbang / Diaojiang | |
| 7 | Цилиндри руль | 1 | ||
| 8 | Батарея | 4 | Trojan/Leoch | |
| 9 | Пуркунандаи барқ | 1 | GPD | |
| 10 | Калиди маҳдудият | 2 | Honeywell/CNTD | |
| 11 | Калиди санҷишӣ | 2 | Honeywell/CNTD | |
| 12 | Ҳаракати мотор | 1 | Куртис | |
| 13 | Шина | 4 | Exmile/Topower | |
| 14 | Сенсори кунҷ | 1 | Honeywell | Ихтиёрӣ |
| 15 | Сенсори фишор | 1 | данфос | Ихтиёрӣ |
IV.Ҷадвали параметрҳои асосии техникӣ
| Адад | Воҳиди | Параметр | Таҳаммулпазирии иҷозатдодашуда | ||
| Андозаи мошин | Дарозӣ (бе нардбон) | mm | 1882(1665) | ±0,5% | |
| Васеъ | mm | 760 | |||
| Баландӣ (платформаи пӯшида) | mm | 2148(1770) | |||
| Пойгоҳи чарх | mm | 1360 | ±0,5% | ||
| Роҳи чарх | mm | 660 | ±0,5% | ||
| Тозакунии ҳадди ақали замин (Ҳимоятгари чоҳ боло/фуромада) | mm | 60/20 | ±5% | ||
| Андозаи платформаи корӣ | Дарозӣ | mm | 1655 | ±0,5% | |
| Васеъ | mm | 740 | |||
| Баландӣ | mm | 1226 | |||
| Дарозии дароз кардани платформаи ёрирасон | mm | 900 | |||
| Мавқеи марказии мошин | Масофаи уфуқӣ то чоҳи пеши | mm | 750 | ±0,5% | |
| Баландии центроид | mm | 570 | |||
| Вазни умумии мошин | kg | 1520 | ±3% | ||
| Макс.баландии платформа | m | 5.8 | ±1% | ||
| Мин.баландии платформа | m | 1.01 | ±1% | ||
| Баландии максималии корӣ | m | 7.8 | ±1% | ||
| Радиуси ҳадди ақали гардиш (чархи дарунӣ/берунӣ) | m | 0/1,75 | ±1% | ||
| Сарбории номиналии платформаи корӣ | kg | 230 | — | ||
| Боркунии боркаш пас аз васеъ кардани платформаи корӣ | kg | 115 | — | ||
| Вақти бардоштани платформаи корӣ | s | 15-30 | — | ||
| Коҳиш додани вақти платформаи корӣ | s | 22-35 | — | ||
| Макс.суръати давидан дар мавқеи паст. | км/соат | ≥4 | — | ||
| Макс.суръати сафар дар баландии баланд | км/соат | ≥0,8 | — | ||
| Сатҳи максималӣ | % | 25 | — | ||
| Кунҷи огоҳии тамға (тараф / пеш ва қафо) | ° | 1,5/3 | |||
| Моторҳои бардоранда / равон | Модели | — | — | — | |
| Қувваи номиналӣ | kW | 3.3 | — | ||
| Истеҳсолкунанда | — | — | — | ||
| Батарея | Модели | — | T105/DT106 | — | |
| Шиддат | v | 24 | — | ||
| Иқтидор | Ah | 225 | — | ||
| Истеҳсолкунанда | — | Trojan/Leoch | — | ||
| Моделҳои шина | — | Беназар ва сахт /305×100 | — | ||
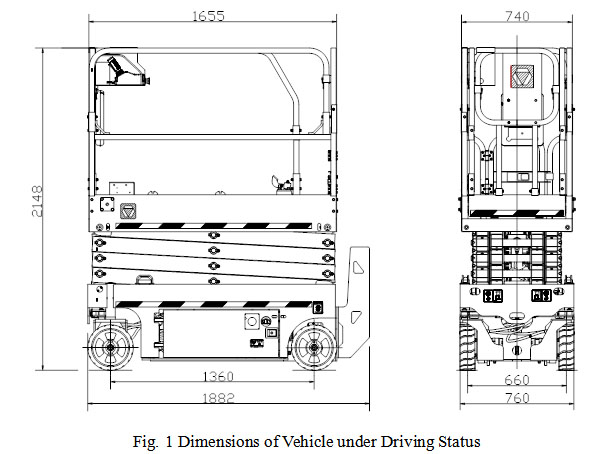
V. Диаграммаи андозагирии мошин дар ҳолати коркунанда
Замима: конфигуратсияҳои ихтиёрӣ
(1) Системаи огоҳкунии бор
(2) Чароғи кории платформа
(3) Ба қубури ҳавоии платформаи корӣ пайваст карда шудааст
(4) Ба таъминоти барқи AC платформаи корӣ пайваст карда шудааст



